The effects of Brexit#
The aim of this notebook is to estimate the causal impact of Brexit upon the UK’s GDP. This will be done using the synthetic control approach. As such, it is similar to the policy brief “What can we know about the cost of Brexit so far?” [Springford, 2022] from the Center for European Reform. That approach did not use Bayesian estimation methods however.
I did not use the GDP data from the above report however as it had been scaled in some way that was hard for me to understand how it related to the absolute GDP figures. Instead, GDP data was obtained courtesy of Prof. Dooruj Rambaccussing. Raw data is in units of trillions of USD.
import arviz as az
import matplotlib.pyplot as plt
import numpy as np
import pandas as pd
from pymc_extras.prior import Prior
import causalpy as cp
%load_ext autoreload
%autoreload 2
%config InlineBackend.figure_format = 'retina'
seed = 42
Load data#
df = (
cp.load_data("brexit")
.assign(Time=lambda x: pd.to_datetime(x["Time"]))
.set_index("Time")
.loc[lambda x: x.index >= "2009-01-01"]
# manual exclusion of some countries
.drop(["Japan", "Italy", "US", "Spain", "Portugal"], axis=1)
)
# specify date of the Brexit vote announcement
treatment_time = pd.to_datetime("2016 June 24")
df.head()
| Australia | Austria | Belgium | Canada | Denmark | Finland | France | Germany | Iceland | Luxemburg | Netherlands | New_Zealand | Norway | Sweden | Switzerland | UK | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Time | ||||||||||||||||
| 2009-01-01 | 3.84048 | 0.802836 | 0.94117 | 16.93824 | 4.50096 | 0.51052 | 5.05450 | 6.63471 | 5.18157 | 0.114836 | 1.634391 | 0.47336 | 7.78753 | 10.32220 | 1.476532 | 4.61881 |
| 2009-04-01 | 3.86954 | 0.796545 | 0.94162 | 16.75340 | 4.41372 | 0.50829 | 5.05375 | 6.64530 | 5.16171 | 0.116259 | 1.634432 | 0.47916 | 7.71903 | 10.32867 | 1.485509 | 4.60431 |
| 2009-07-01 | 3.88115 | 0.799937 | 0.95352 | 16.82878 | 4.42898 | 0.51299 | 5.06237 | 6.68237 | 5.24132 | 0.118747 | 1.640982 | 0.48188 | 7.72400 | 10.32328 | 1.502506 | 4.60722 |
| 2009-10-01 | 3.91028 | 0.803823 | 0.96117 | 17.02503 | 4.43300 | 0.50903 | 5.09832 | 6.73155 | 5.22482 | 0.119302 | 1.650866 | 0.48805 | 7.72812 | 10.37107 | 1.515139 | 4.62152 |
| 2010-01-01 | 3.92716 | 0.800510 | 0.96615 | 17.23041 | 4.47128 | 0.51413 | 5.11625 | 6.78621 | 4.91128 | 0.121414 | 1.647748 | 0.49349 | 7.87891 | 10.64833 | 1.525864 | 4.65380 |
# get useful country lists
target_country = "UK"
all_countries = df.columns
other_countries = all_countries.difference({target_country})
all_countries = list(all_countries)
other_countries = list(other_countries)
Data visualization#
az.style.use("arviz-white")
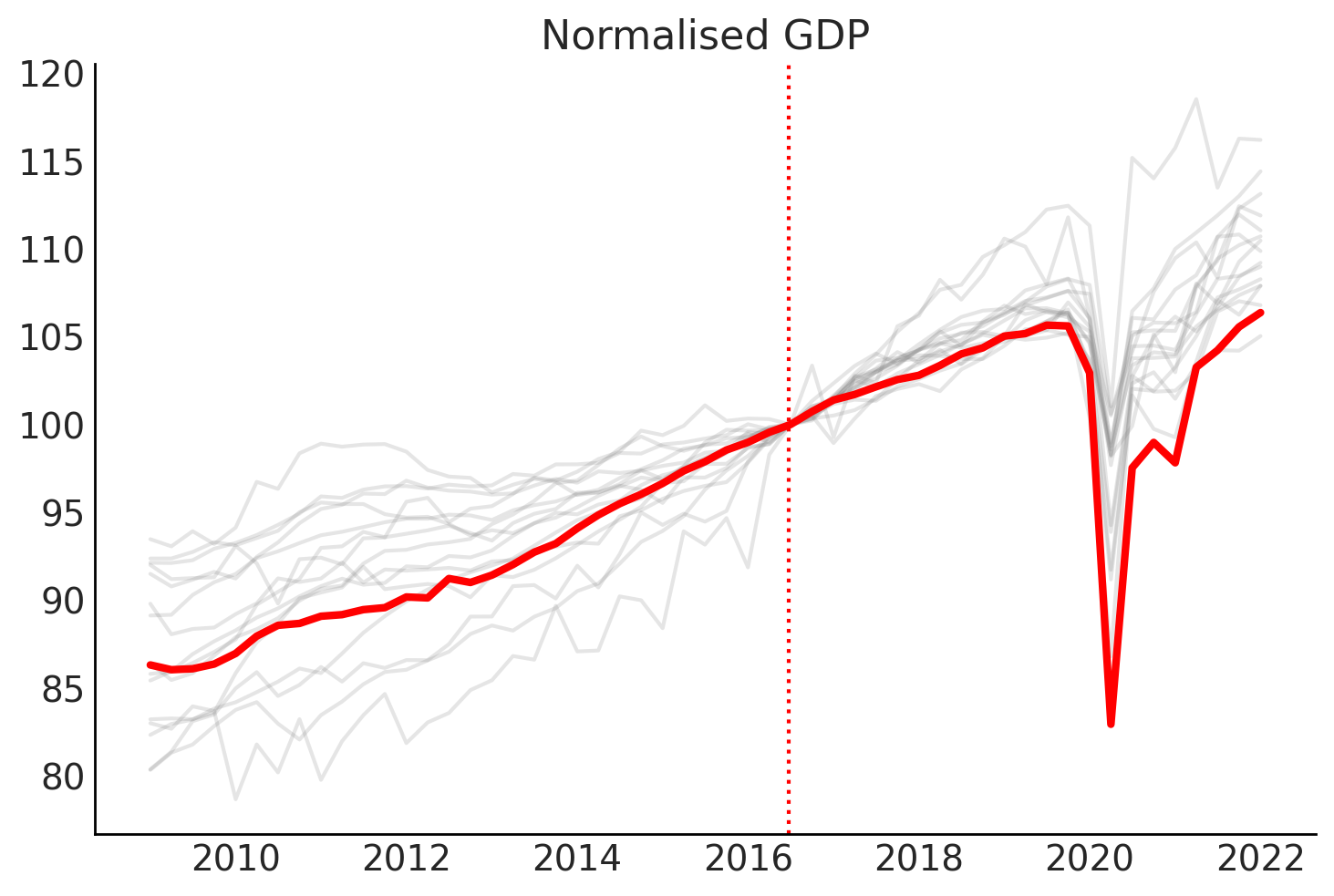
# Plot the time series normalised so that intervention point (Q3 2016) is equal to 100
gdp_at_intervention = df.loc[pd.to_datetime("2016 July 01"), :]
df_normalised = (df / gdp_at_intervention) * 100.0
# plot
fig, ax = plt.subplots()
for col in other_countries:
ax.plot(df_normalised.index, df_normalised[col], color="grey", alpha=0.2)
ax.plot(df_normalised.index, df_normalised[target_country], color="red", lw=3)
# ax = df_normalised.plot(legend=False)
# formatting
ax.set(title="Normalised GDP")
ax.axvline(x=treatment_time, color="r", ls=":");
pre_intervention_data = df.loc[df.index < treatment_time, :]
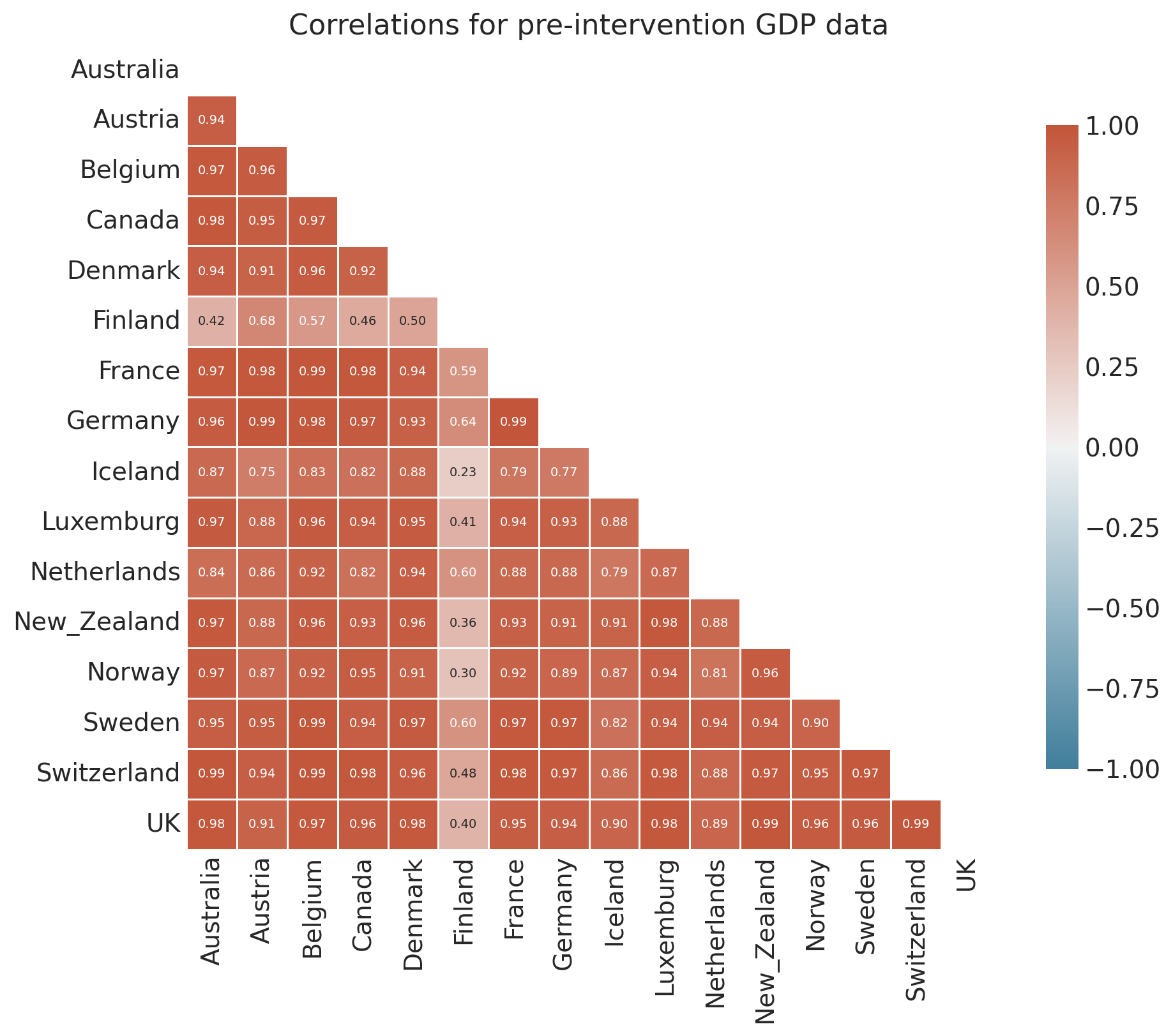
corr, ax = cp.plot_correlations(
pre_intervention_data, figsize=(10, 8), annot_kws={"size": 7}
)
ax.set(title="Correlations for pre-intervention GDP data");
Donor pool selection#
The heatmap reveals that most countries are strongly positively correlated with the UK’s pre-Brexit GDP trajectory, but Italy and Portugal are negatively correlated, and Spain is near zero. Including negatively correlated donors can introduce interpolation bias in the synthetic control [Abadie et al., 2010, Abadie, 2021], and Abadie and L'Hour [2021] show that dissimilar donors amplify estimation error.
Practical guideline
Exclude control units that are negatively correlated (or only weakly correlated) with the treated unit in the pre-treatment period. This is especially important for Bayesian implementations where the Dirichlet prior assigns non-zero weight to every donor.
For this dataset, we exclude Italy, Portugal, and Spain from the donor pool before fitting the model.
uk_corr = corr["UK"].drop("UK")
threshold = 0.1
excluded = list(uk_corr[uk_corr < threshold].index)
other_countries = [c for c in other_countries if c not in excluded]
print(f"Excluded: {excluded}")
print(f"Remaining donors ({len(other_countries)}): {other_countries}")
Excluded: []
Remaining donors (15): ['Australia', 'Austria', 'Belgium', 'Canada', 'Denmark', 'Finland', 'France', 'Germany', 'Iceland', 'Luxemburg', 'Netherlands', 'New_Zealand', 'Norway', 'Sweden', 'Switzerland']
Run the analysis#
Note: The analysis is (and should be) run on the raw GDP data. We do not use the normalised data shown above which was just for ease of visualization.
Note
The random_seed keyword argument for the PyMC sampler is not necessary. We use it here so that the results are reproducible.
sample_kwargs = {"tune": 1000, "target_accept": 0.99, "random_seed": seed}
result = cp.SyntheticControl(
df,
treatment_time,
control_units=other_countries,
treated_units=[target_country],
model=cp.pymc_models.WeightedSumFitter(
sample_kwargs=sample_kwargs,
),
)
Initializing NUTS using jitter+adapt_diag...
Multiprocess sampling (4 chains in 4 jobs)
NUTS: [beta, y_hat_sigma]
Sampling 4 chains for 1_000 tune and 1_000 draw iterations (4_000 + 4_000 draws total) took 81 seconds.
There were 2 divergences after tuning. Increase `target_accept` or reparameterize.
Chain 0 reached the maximum tree depth. Increase `max_treedepth`, increase `target_accept` or reparameterize.
Chain 1 reached the maximum tree depth. Increase `max_treedepth`, increase `target_accept` or reparameterize.
Chain 2 reached the maximum tree depth. Increase `max_treedepth`, increase `target_accept` or reparameterize.
Chain 3 reached the maximum tree depth. Increase `max_treedepth`, increase `target_accept` or reparameterize.
The rhat statistic is larger than 1.01 for some parameters. This indicates problems during sampling. See https://arxiv.org/abs/1903.08008 for details
The effective sample size per chain is smaller than 100 for some parameters. A higher number is needed for reliable rhat and ess computation. See https://arxiv.org/abs/1903.08008 for details
Sampling: [beta, y_hat, y_hat_sigma]
Sampling: [y_hat]
Sampling: [y_hat]
Sampling: [y_hat]
Sampling: [y_hat]
While we are at it, let’s plot the graphviz representation of the model. This shows us the inner workings of the WeightedSumFitter class which defines our synthetic control model with a sum to 1 constraint on the donor weights (here labelled as coeffs). This will be particularly useful when we come to exploring custom priors (see below).
result.model.to_graphviz()

We currently get some divergences, but these are mostly dealt with by increasing tune and target_accept sampling parameters. Nevertheless, the sampling of this dataset/model combination feels a little brittle.
result.idata
-
<xarray.Dataset> Size: 1MB Dimensions: (chain: 4, draw: 1000, treated_units: 1, coeffs: 15, obs_ind: 30) Coordinates: * chain (chain) int64 32B 0 1 2 3 * draw (draw) int64 8kB 0 1 2 3 4 5 6 ... 994 995 996 997 998 999 * treated_units (treated_units) <U2 8B 'UK' * coeffs (coeffs) <U11 660B 'Australia' 'Austria' ... 'Switzerland' * obs_ind (obs_ind) int64 240B 0 1 2 3 4 5 6 7 ... 23 24 25 26 27 28 29 Data variables: beta (chain, draw, treated_units, coeffs) float64 480kB 0.2494 ... y_hat_sigma (chain, draw, treated_units) float64 32kB 0.0351 ... 0.02528 mu (chain, draw, obs_ind, treated_units) float64 960kB 4.598 ... Attributes: created_at: 2026-02-28T22:18:02.952677+00:00 arviz_version: 0.23.4 inference_library: pymc inference_library_version: 5.27.1 sampling_time: 80.99764895439148 tuning_steps: 1000 -
<xarray.Dataset> Size: 968kB Dimensions: (chain: 4, draw: 1000, obs_ind: 30, treated_units: 1) Coordinates: * chain (chain) int64 32B 0 1 2 3 * draw (draw) int64 8kB 0 1 2 3 4 5 6 ... 994 995 996 997 998 999 * obs_ind (obs_ind) int64 240B 0 1 2 3 4 5 6 7 ... 23 24 25 26 27 28 29 * treated_units (treated_units) <U2 8B 'UK' Data variables: y_hat (chain, draw, obs_ind, treated_units) float64 960kB 4.613 ... Attributes: created_at: 2026-02-28T22:18:03.199273+00:00 arviz_version: 0.23.4 inference_library: pymc inference_library_version: 5.27.1 -
<xarray.Dataset> Size: 528kB Dimensions: (chain: 4, draw: 1000) Coordinates: * chain (chain) int64 32B 0 1 2 3 * draw (draw) int64 8kB 0 1 2 3 4 5 ... 995 996 997 998 999 Data variables: (12/18) divergences (chain, draw) int64 32kB 0 0 0 0 0 0 ... 1 1 1 1 1 1 step_size_bar (chain, draw) float64 32kB 0.001832 ... 0.002083 perf_counter_diff (chain, draw) float64 32kB 0.03848 ... 0.03015 acceptance_rate (chain, draw) float64 32kB 0.9983 0.9958 ... 0.9904 reached_max_treedepth (chain, draw) bool 4kB True True True ... True True diverging (chain, draw) bool 4kB False False ... False False ... ... tree_depth (chain, draw) int64 32kB 10 10 10 10 ... 10 10 10 10 energy_error (chain, draw) float64 32kB 0.002337 ... -0.07935 n_steps (chain, draw) float64 32kB 1.023e+03 ... 1.023e+03 step_size (chain, draw) float64 32kB 0.001714 ... 0.00155 lp (chain, draw) float64 32kB 38.28 40.37 ... 40.34 energy (chain, draw) float64 32kB -28.31 -30.91 ... -30.58 Attributes: created_at: 2026-02-28T22:18:02.960716+00:00 arviz_version: 0.23.4 inference_library: pymc inference_library_version: 5.27.1 sampling_time: 80.99764895439148 tuning_steps: 1000 -
<xarray.Dataset> Size: 189kB Dimensions: (chain: 1, draw: 500, treated_units: 1, obs_ind: 30, coeffs: 15) Coordinates: * chain (chain) int64 8B 0 * draw (draw) int64 4kB 0 1 2 3 4 5 6 ... 494 495 496 497 498 499 * treated_units (treated_units) <U2 8B 'UK' * obs_ind (obs_ind) int64 240B 0 1 2 3 4 5 6 7 ... 23 24 25 26 27 28 29 * coeffs (coeffs) <U11 660B 'Australia' 'Austria' ... 'Switzerland' Data variables: y_hat_sigma (chain, draw, treated_units) float64 4kB 0.4183 ... 0.9914 mu (chain, draw, obs_ind, treated_units) float64 120kB 5.152 ... beta (chain, draw, treated_units, coeffs) float64 60kB 0.01612 ... Attributes: created_at: 2026-02-28T22:18:03.118333+00:00 arviz_version: 0.23.4 inference_library: pymc inference_library_version: 5.27.1 -
<xarray.Dataset> Size: 124kB Dimensions: (chain: 1, draw: 500, obs_ind: 30, treated_units: 1) Coordinates: * chain (chain) int64 8B 0 * draw (draw) int64 4kB 0 1 2 3 4 5 6 ... 494 495 496 497 498 499 * obs_ind (obs_ind) int64 240B 0 1 2 3 4 5 6 7 ... 23 24 25 26 27 28 29 * treated_units (treated_units) <U2 8B 'UK' Data variables: y_hat (chain, draw, obs_ind, treated_units) float64 120kB 4.462 ... Attributes: created_at: 2026-02-28T22:18:03.120626+00:00 arviz_version: 0.23.4 inference_library: pymc inference_library_version: 5.27.1 -
<xarray.Dataset> Size: 488B Dimensions: (obs_ind: 30, treated_units: 1) Coordinates: * obs_ind (obs_ind) int64 240B 0 1 2 3 4 5 6 7 ... 23 24 25 26 27 28 29 * treated_units (treated_units) <U2 8B 'UK' Data variables: y_hat (obs_ind, treated_units) float64 240B 4.619 4.604 ... 5.327 Attributes: created_at: 2026-02-28T22:18:02.963187+00:00 arviz_version: 0.23.4 inference_library: pymc inference_library_version: 5.27.1 -
<xarray.Dataset> Size: 4kB Dimensions: (obs_ind: 30, coeffs: 15) Coordinates: * obs_ind (obs_ind) int64 240B 0 1 2 3 4 5 6 7 8 ... 22 23 24 25 26 27 28 29 * coeffs (coeffs) <U11 660B 'Australia' 'Austria' ... 'Sweden' 'Switzerland' Data variables: X (obs_ind, coeffs) float64 4kB 3.84 0.8028 0.9412 ... 12.37 1.719 Attributes: created_at: 2026-02-28T22:18:02.964081+00:00 arviz_version: 0.23.4 inference_library: pymc inference_library_version: 5.27.1
Check the MCMC chain mixing via the Rhat statistic.
az.summary(result.idata, var_names=["~mu"])
| mean | sd | hdi_3% | hdi_97% | mcse_mean | mcse_sd | ess_bulk | ess_tail | r_hat | |
|---|---|---|---|---|---|---|---|---|---|
| beta[UK, Australia] | 0.120 | 0.073 | 0.000 | 0.241 | 0.003 | 0.001 | 489.0 | 424.0 | 1.01 |
| beta[UK, Austria] | 0.045 | 0.042 | 0.000 | 0.122 | 0.001 | 0.001 | 1057.0 | 815.0 | 1.00 |
| beta[UK, Belgium] | 0.050 | 0.046 | 0.000 | 0.131 | 0.001 | 0.001 | 886.0 | 589.0 | 1.00 |
| beta[UK, Canada] | 0.039 | 0.022 | 0.000 | 0.076 | 0.001 | 0.001 | 486.0 | 536.0 | 1.00 |
| beta[UK, Denmark] | 0.086 | 0.062 | 0.000 | 0.196 | 0.002 | 0.001 | 681.0 | 668.0 | 1.00 |
| beta[UK, Finland] | 0.041 | 0.038 | 0.000 | 0.110 | 0.001 | 0.001 | 380.0 | 300.0 | 1.01 |
| beta[UK, France] | 0.030 | 0.027 | 0.000 | 0.081 | 0.001 | 0.001 | 832.0 | 768.0 | 1.00 |
| beta[UK, Germany] | 0.026 | 0.024 | 0.000 | 0.069 | 0.001 | 0.001 | 922.0 | 1269.0 | 1.00 |
| beta[UK, Iceland] | 0.153 | 0.040 | 0.076 | 0.227 | 0.001 | 0.001 | 866.0 | 1159.0 | 1.01 |
| beta[UK, Luxemburg] | 0.051 | 0.045 | 0.000 | 0.133 | 0.001 | 0.001 | 787.0 | 647.0 | 1.00 |
| beta[UK, Netherlands] | 0.049 | 0.044 | 0.000 | 0.132 | 0.001 | 0.001 | 745.0 | 907.0 | 1.01 |
| beta[UK, New_Zealand] | 0.064 | 0.053 | 0.000 | 0.162 | 0.002 | 0.001 | 818.0 | 1000.0 | 1.00 |
| beta[UK, Norway] | 0.084 | 0.043 | 0.007 | 0.158 | 0.002 | 0.001 | 567.0 | 718.0 | 1.01 |
| beta[UK, Sweden] | 0.098 | 0.031 | 0.038 | 0.156 | 0.001 | 0.001 | 594.0 | 302.0 | 1.01 |
| beta[UK, Switzerland] | 0.065 | 0.055 | 0.000 | 0.166 | 0.001 | 0.001 | 4595.0 | 2657.0 | 1.00 |
| y_hat_sigma[UK] | 0.031 | 0.005 | 0.022 | 0.039 | 0.000 | 0.000 | 922.0 | 1645.0 | 1.01 |
You can inspect the traces in more detail with:
az.plot_trace(result.idata, var_names="~mu", compact=False);
az.style.use("arviz-darkgrid")
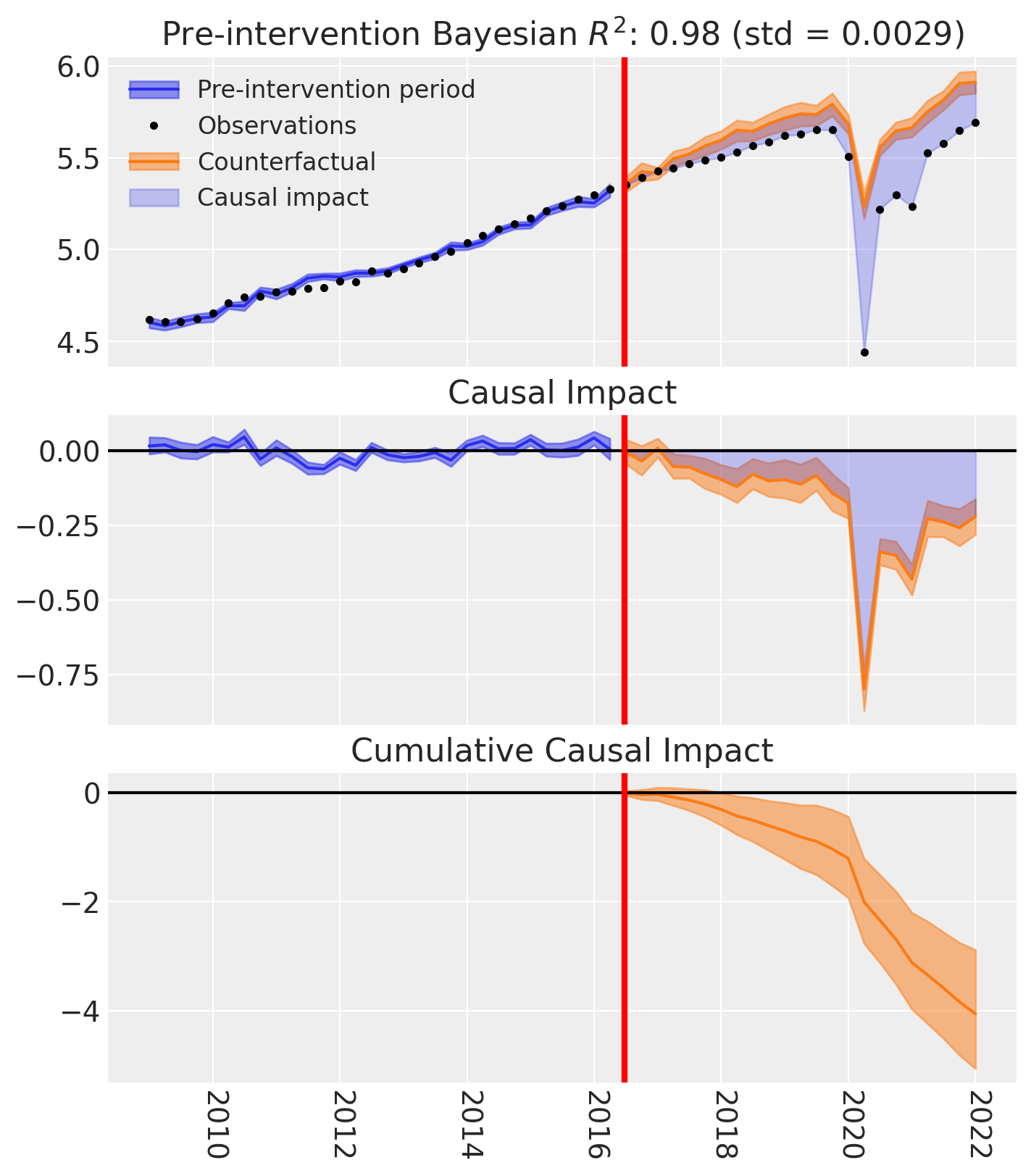
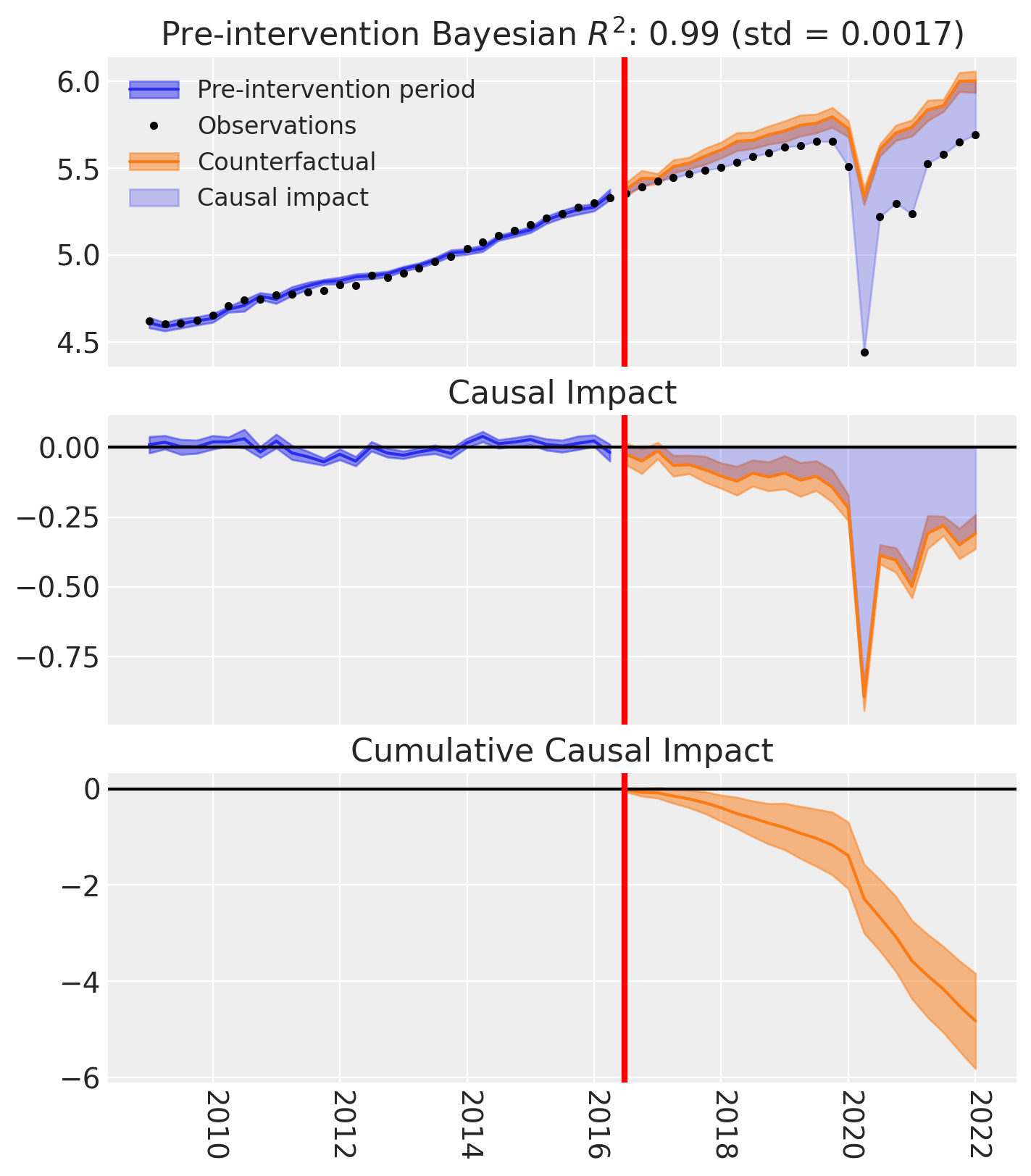
fig, ax = result.plot(plot_predictors=False)
for i in [0, 1, 2]:
ax[i].set(ylabel="Trillion USD")
result.summary()
================================SyntheticControl================================
Control units: ['Australia', 'Austria', 'Belgium', 'Canada', 'Denmark', 'Finland', 'France', 'Germany', 'Iceland', 'Luxemburg', 'Netherlands', 'New_Zealand', 'Norway', 'Sweden', 'Switzerland']
Treated unit: UK
Model coefficients:
Australia 0.12, 94% HDI [0.0073, 0.26]
Austria 0.045, 94% HDI [0.0014, 0.15]
Belgium 0.05, 94% HDI [0.0014, 0.16]
Canada 0.039, 94% HDI [0.0039, 0.084]
Denmark 0.086, 94% HDI [0.0039, 0.22]
Finland 0.041, 94% HDI [0.00097, 0.14]
France 0.03, 94% HDI [0.0011, 0.094]
Germany 0.026, 94% HDI [0.0012, 0.083]
Iceland 0.15, 94% HDI [0.078, 0.23]
Luxemburg 0.051, 94% HDI [0.0016, 0.16]
Netherlands 0.049, 94% HDI [0.0022, 0.16]
New_Zealand 0.064, 94% HDI [0.0021, 0.19]
Norway 0.084, 94% HDI [0.012, 0.17]
Sweden 0.098, 94% HDI [0.037, 0.15]
Switzerland 0.065, 94% HDI [0.0026, 0.2]
y_hat_sigma 0.031, 94% HDI [0.023, 0.04]
Pre-treatment correlation (UK): 0.9927
Effect Summary Reporting#
For decision-making, you often need a concise summary of the causal effect with key statistics. The effect_summary() method provides a decision-ready report with average and cumulative effects, HDI intervals, tail probabilities, and relative effects. This provides a comprehensive summary without manual post-processing.
# Generate effect summary for the full post-period
stats = result.effect_summary()
stats.table
| mean | median | hdi_lower | hdi_upper | p_gt_0 | relative_mean | relative_hdi_lower | relative_hdi_upper | |
|---|---|---|---|---|---|---|---|---|
| average | -0.176440 | -0.177094 | -0.223437 | -0.123983 | 0.0 | -3.131885 | -3.935682 | -2.222815 |
| cumulative | -4.058127 | -4.073160 | -5.139048 | -2.851613 | 0.0 | -3.131885 | -3.935682 | -2.222815 |
# View the prose summary
print(stats.text)
During the post-period (2016-07-01 00:00:00 to 2022-01-01 00:00:00), the response variable had an average value of approx. 5.45. By contrast, in the absence of an intervention, we would have expected an average response of 5.63. The 95% interval of this counterfactual prediction is [5.58, 5.68]. Subtracting this prediction from the observed response yields an estimate of the causal effect the intervention had on the response variable. This effect is -0.18 with a 95% interval of [-0.22, -0.12].
Summing up the individual data points during the post-period, the response variable had an overall value of 125.44. By contrast, had the intervention not taken place, we would have expected a sum of 129.49. The 95% interval of this prediction is [128.29, 130.58].
The 95% HDI of the effect [-0.22, -0.12] does not include zero. The posterior probability of a decrease is 1.000. Relative to the counterfactual, the effect represents a -3.13% change (95% HDI [-3.94%, -2.22%]).
This analysis assumes that the control units used to construct the synthetic counterfactual were not themselves affected by the intervention, and that the pre-treatment relationship between control and treated units remains stable throughout the post-treatment period. We recommend inspecting model fit, examining pre-intervention trends, and conducting sensitivity analyses (e.g., placebo tests) to support any causal conclusions drawn from this analysis.
# You can also analyze a specific time window, e.g., the first year after Brexit
stats_window = result.effect_summary(
window=(pd.to_datetime("2016-06-24"), pd.to_datetime("2017-06-24"))
)
stats_window.table
| mean | median | hdi_lower | hdi_upper | p_gt_0 | relative_mean | relative_hdi_lower | relative_hdi_upper | |
|---|---|---|---|---|---|---|---|---|
| average | -0.019805 | -0.020350 | -0.058699 | 0.026280 | 0.17525 | -0.363716 | -1.074848 | 0.488819 |
| cumulative | -0.079221 | -0.081401 | -0.234795 | 0.105119 | 0.17525 | -0.363716 | -1.074848 | 0.488819 |
Understanding the Convex Hull Assumption#
The synthetic control method relies on a fundamental mathematical constraint that is important to understand.
The Mathematical Constraint#
In synthetic control, we construct a counterfactual as a weighted combination of control units:
where the weights satisfy:
Non-negativity: \(\beta_i \geq 0\) for all \(i\)
Sum-to-one: \(\sum_{i=1}^{n} \beta_i = 1\)
These constraints mean our synthetic control is a convex combination of the control units. By definition, a convex combination can only produce values within the convex hull of the input points—mathematically, it cannot extrapolate beyond the range of the control units.
What This Means in Practice#
At each time point, the synthetic control value must lie between the minimum and maximum of the control units:
This is a necessary condition for the method to work. If the treated unit’s pre-intervention values fall outside this range—either consistently above all controls or consistently below all controls—no valid convex combination can match the treated trajectory.
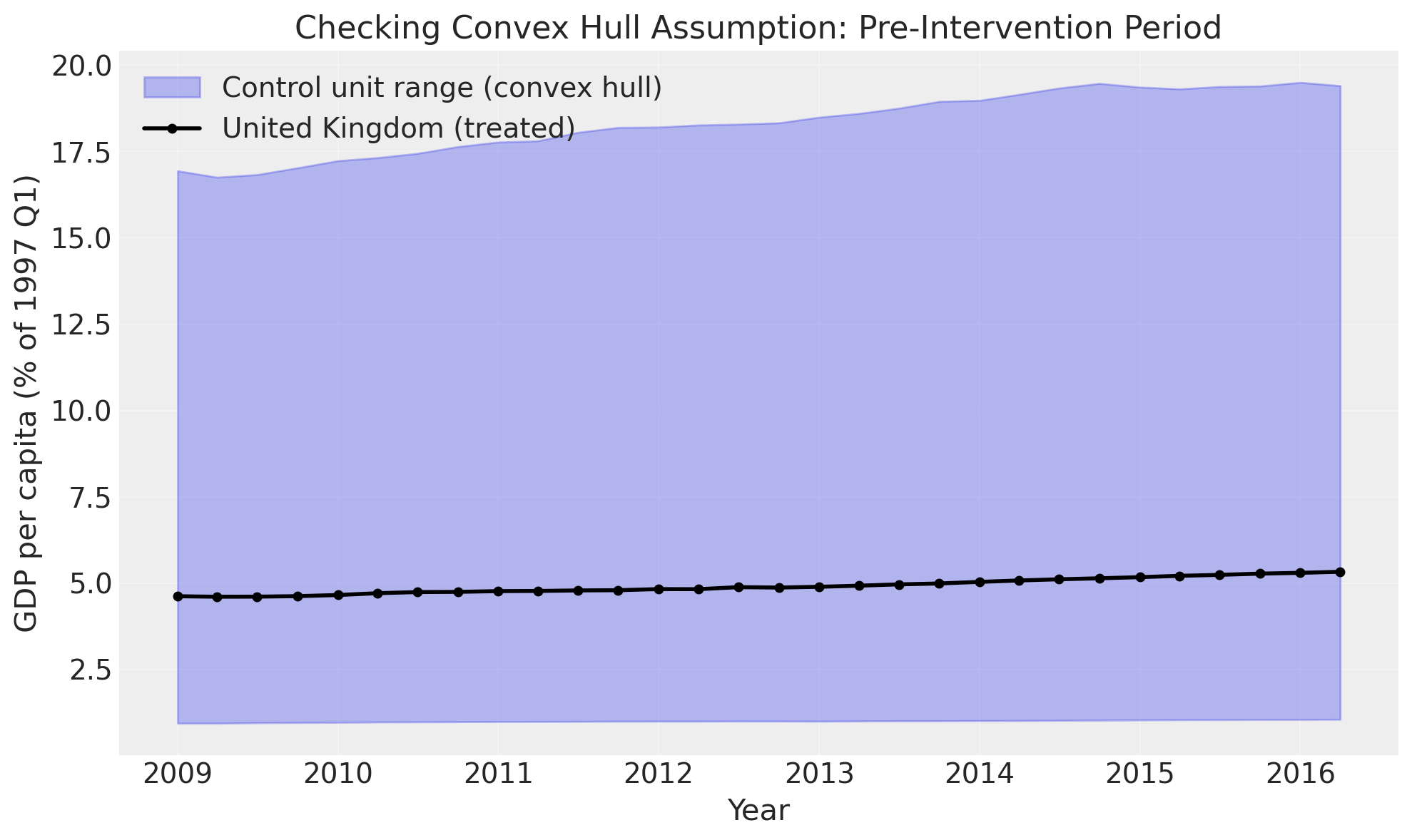
Checking the Assumption#
CausalPy automatically checks this assumption when you fit a synthetic control model. Let’s visualize what this looks like with our Brexit data:
Show code cell source
import matplotlib.pyplot as plt
import numpy as np
# Extract pre-intervention data
pre_data = df[df.index < treatment_time]
# Get control and treated series
control_countries = [
"Australia",
"Belgium",
"Canada",
"Denmark",
"France",
"Germany",
# "Italy",
# "Japan",
"Netherlands",
"Norway",
"Sweden",
"Switzerland",
# "USA",
]
treated_country = "UK"
# Calculate control envelope
control_min = pre_data[control_countries].min(axis=1)
control_max = pre_data[control_countries].max(axis=1)
# Create visualization
fig, ax = plt.subplots(figsize=(10, 6))
# Plot control envelope as shaded region
ax.fill_between(
pre_data.index,
control_min,
control_max,
alpha=0.3,
color="C0",
label="Control unit range (convex hull)",
)
# Plot treated series
ax.plot(
pre_data.index,
pre_data[treated_country],
"ko-",
linewidth=2,
markersize=4,
label="United Kingdom (treated)",
)
# Highlight any violations
above = pre_data[treated_country] > control_max
below = pre_data[treated_country] < control_min
if above.any():
ax.scatter(
pre_data.index[above],
pre_data[treated_country][above],
color="red",
s=100,
marker="x",
zorder=5,
label="Points above control range",
)
if below.any():
ax.scatter(
pre_data.index[below],
pre_data[treated_country][below],
color="orange",
s=100,
marker="x",
zorder=5,
label="Points below control range",
)
ax.set_xlabel("Year")
ax.set_ylabel("GDP per capita (% of 1997 Q1)")
ax.set_title("Checking Convex Hull Assumption: Pre-Intervention Period")
ax.legend(loc="upper left")
ax.grid(True, alpha=0.3)
plt.tight_layout()
plt.show()
/var/folders/r0/nf1kgxsx6zx3rw16xc3wnnzr0000gn/T/ipykernel_28386/2891153136.py:83: UserWarning: The figure layout has changed to tight
plt.tight_layout()
Show code cell source
n_violations = above.sum() + below.sum()
if n_violations > 0:
print(f"⚠️ Warning: {n_violations} time points outside control range")
print(
f" - {above.sum()} points above control range ({100 * above.sum() / len(pre_data):.1f}%)"
)
print(
f" - {below.sum()} points below control range ({100 * below.sum() / len(pre_data):.1f}%)"
)
else:
print("✓ Convex hull assumption satisfied: All treated values within control range")
✓ Convex hull assumption satisfied: All treated values within control range
Interpreting the Results#
For this Brexit analysis:
Good fit: The UK’s pre-Brexit GDP trajectory lies mostly within the range of control countries, suggesting the convex hull assumption is reasonably satisfied.
High R²: The strong pre-intervention fit (R² ≈ 0.97) we saw earlier confirms that a convex combination of control countries can indeed approximate the UK’s trajectory.
When the Assumption is Violated#
If you see many points outside the shaded region, this indicates potential problems:
Poor counterfactual quality: The synthetic control cannot accurately match the treated unit’s pre-intervention trajectory
Biased effect estimates: The treatment effect estimates may be unreliable
Invalid inference: Confidence/credible intervals may not have correct coverage
What to Do if Violated#
Several alternatives exist when the convex hull assumption is violated:
Add more diverse control units: Include countries/units with different characteristics that better span the range of the treated unit
Consider use of Augmented Synthetic Control Method: This method [Ben-Michael et al., 2021] relaxes the convex hull assumption
Consider use of Comparative interrupted time-series: With an intercept term, this approach can handle systematic differences in levels between treated and control units
Key Takeaway#
The convex hull condition is a fundamental requirement for synthetic control methods. Always check this assumption using visualizations like the one above or by examining the warnings CausalPy provides. For more details, see Abadie et al. [2010].
Custom priors#
The analysis above is all based upon the default priors for the WeightedSumFitter class. But this might not always be appropriate. In particular the default Priors are Dirichlet distributed with an alpha parameter of 1. This corresponds to a uniform prior over the simplex.
But we might have different prior beliefs. For example, we might think that some control units will play a larger role and some control units will be irrelevant. In which case, we could use as less concentrated prior, such as \(\mathrm{Dirichlet}(0.1)\).
We can do this in the code below.
n_control_units = len(other_countries)
result_custom = cp.SyntheticControl(
df,
treatment_time,
control_units=other_countries,
treated_units=[target_country],
model=cp.pymc_models.WeightedSumFitter(
sample_kwargs=sample_kwargs,
priors={
"beta": Prior(
"Dirichlet",
a=0.1 * np.ones(n_control_units),
dims=["treated_units", "coeffs"],
),
},
),
)
Initializing NUTS using jitter+adapt_diag...
Multiprocess sampling (4 chains in 4 jobs)
NUTS: [beta, y_hat_sigma]
Sampling 4 chains for 1_000 tune and 1_000 draw iterations (4_000 + 4_000 draws total) took 79 seconds.
There were 23 divergences after tuning. Increase `target_accept` or reparameterize.
Chain 0 reached the maximum tree depth. Increase `max_treedepth`, increase `target_accept` or reparameterize.
Chain 1 reached the maximum tree depth. Increase `max_treedepth`, increase `target_accept` or reparameterize.
Chain 2 reached the maximum tree depth. Increase `max_treedepth`, increase `target_accept` or reparameterize.
Chain 3 reached the maximum tree depth. Increase `max_treedepth`, increase `target_accept` or reparameterize.
The rhat statistic is larger than 1.01 for some parameters. This indicates problems during sampling. See https://arxiv.org/abs/1903.08008 for details
The effective sample size per chain is smaller than 100 for some parameters. A higher number is needed for reliable rhat and ess computation. See https://arxiv.org/abs/1903.08008 for details
Sampling: [beta, y_hat, y_hat_sigma]
Sampling: [y_hat]
Sampling: [y_hat]
Sampling: [y_hat]
Sampling: [y_hat]
The main results plot shows only minor differences in terms of fitting.
fig, ax = result_custom.plot(plot_predictors=False)
for i in [0, 1, 2]:
ax[i].set(ylabel="Trillion USD")
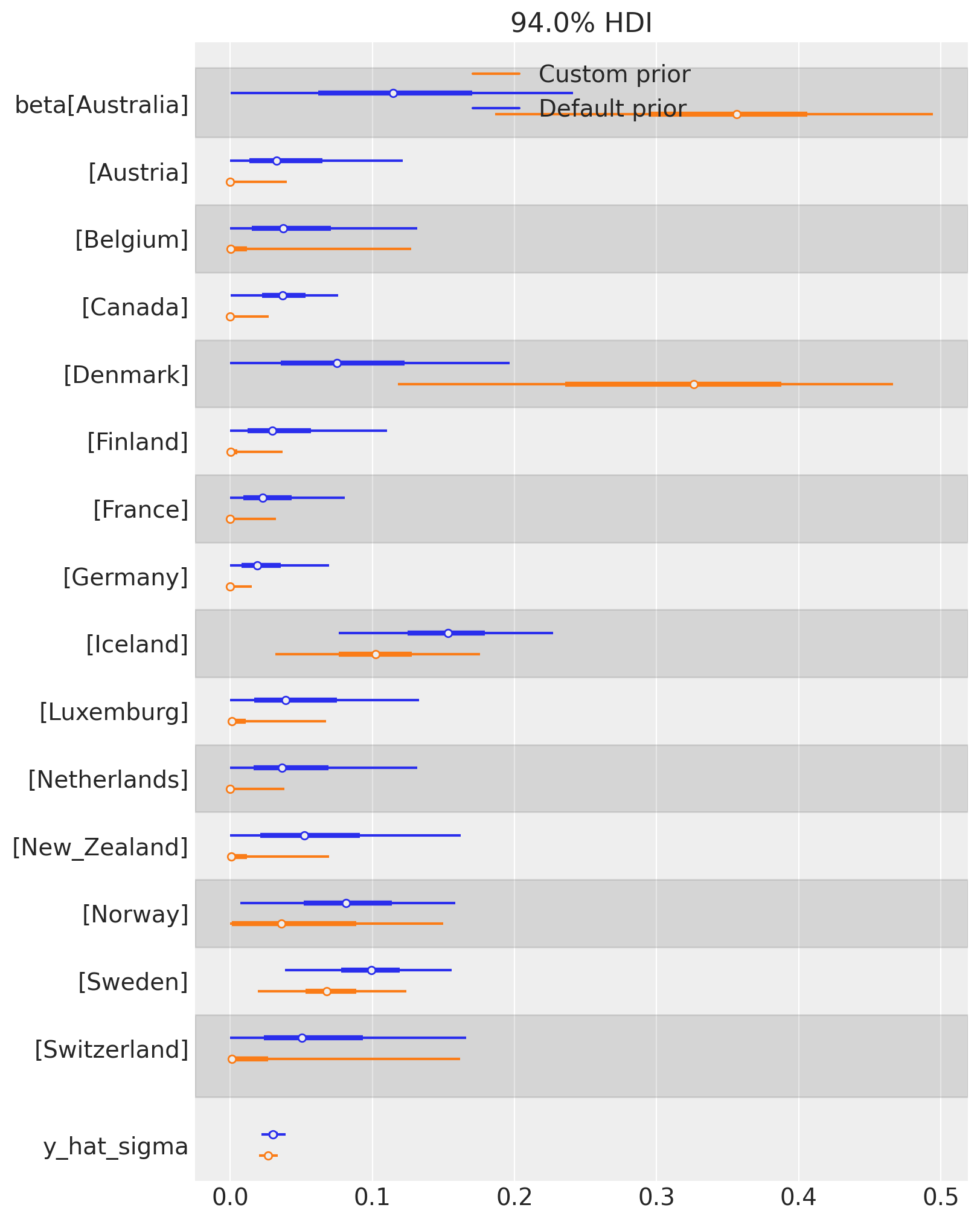
We can also examine the effect of changing the Dirichlet prior on the posterior distribution of weights. TWe can see that the custom prior of \(\mathrm{Dirichlet}(0.1)\) results in more sparse weights over control countries. The posterior of many countries are more concentrated near zero (e.g. Austria, Canada, Germany, etc), while others have increased in importance (e.g. Denmark, and Australia).
This is a rich area for discussion, but the key point is that users can define their own prior beliefs about the weights in the synthetic control model. There are some benefits from having ‘sparsifying’ priors in that they can help identify a smaller set of key control units that are most relevant to constructing the synthetic control.
Show code cell source
az.plot_forest(
[result.idata, result_custom.idata],
model_names=["Default prior", "Custom prior"],
var_names=["beta", "y_hat_sigma"],
combined=True,
figsize=(8, 10),
);
References#
Alberto Abadie, Alexis Diamond, and Jens Hainmueller. Synthetic control methods for comparative case studies: estimating the effect of california's tobacco control program. Journal of the American Statistical Association, 105(490):493–505, 2010.
Alberto Abadie. Using synthetic controls: feasibility, data requirements, and methodological aspects. Journal of Economic Literature, 59(2):391–425, 2021.
Eli Ben-Michael, Ari Feller, and Jesse Rothstein. The augmented synthetic control method. Journal of the American Statistical Association, 116(536):1789–1803, 2021.
John Springford. What can we know about the cost of brexit so far? 2022. URL: https://www.cer.eu/publications/archive/policy-brief/2022/cost-brexit-so-far.
Alberto Abadie and Jérémy L'Hour. A penalized synthetic control estimator for disaggregated data. Journal of the American Statistical Association, 116(536):1817–1834, 2021.